

— 以下内容取自参考文章 —
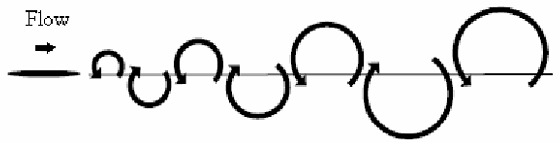
当扑翼在其扑动时,上排涡方向为逆时针,下排涡方向为顺时针,尾涡中各处的诱导速度与来流相同,因此机翼会受到与来流方向相反的作用力,也就是推力。
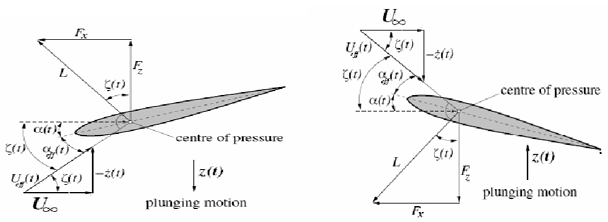
扑翼机构目前主要是单自由度运动,这类驱动的结构简单、重量轻,因而,目前微型飞行器多采用单自由度扑动翼机构,即为平面上下扑动,这种扑动方式,如果是刚性翼,平均升力为零,只能依靠翼的被动柔性变形产生升力,给气动控制带来难度。为了使扑翼的运动更符合生物翅膀运动的形态,符合生物飞行的空气动力学,必须研究多自由度扑翼驱动机构问题。蝴蝶扇翅的幅度较大(甚至接近180°),频率较低(10 Hz左右),且伴随着和身体运动的高度耦合。
对蝴蝶飞行机理的研究存在以下挑战。首先,蝴蝶扑翼飞行运动本身具有低频、大幅值的特征;前翼存在前掠–后掠运动(“Lead–lag motion”),即前翼下扑时沿机体纵轴方向向前掠,前后翼重叠面积减小,上扑时相反;同时,翼沿展向存在一定的扭转角。

这些都与蝴蝶飞行性能有着一定的关系。其次,由于蝴蝶的双翼质量占比较高并长在其胸部位置,在气动力和惯性力的共同作用下,大幅度的扑翼运动会使得胸部输出与拍打同频率的俯仰震荡,在绝大多数飞行状态下(如起飞、悬停、前飞等),腹部都会伴随胸部的俯仰震荡而摆动,这在一定程度上会影响蝴蝶纵向飞行的稳定,甚至一些机动飞行的表现。最后,蝴蝶双翼在飞行过程中呈现出多方向的大柔性变形。
扑翼机构采用单电机四曲柄双摇杆驱动
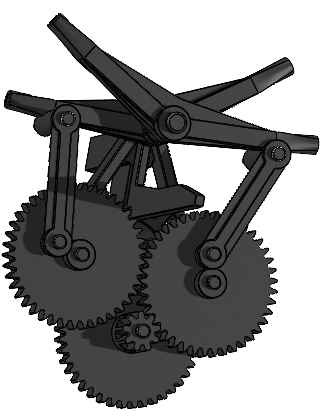
扑翼实在是不知道怎么画所以就照着样子使用Ctrl+c,Ctrl+v大法复制了一下,蒙皮打算采用的是0.01mm的 pi膜。
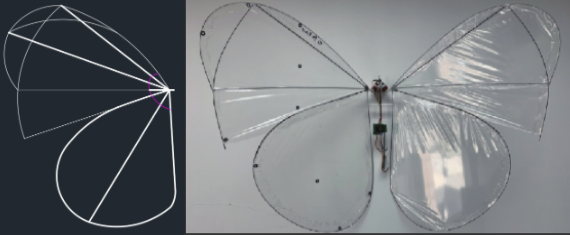
大概长这样 (感觉怪怪的这两个翅翼不在一个水平线上真的没事吗)

先照着线稿把碳纤维杆的长度剪出来然后粘好,剪一个大概的样子试试形变什么样


虽然在手上时扑翼效果挺好但是一松手扑翼频率就会变小,只能滑翔一小段距离。
Comments 1 条评论
我勒个去,硬核